Le capteur de proximité
1°) Principe
Le capteur que nous allons utilisé est un capteur de distance à ultrason. Il fonctionne avec une partie emetteur d’onde et une partie récepteur d’onde.
Cette onde va se déplacer dans l’air (comme le son) et être renvoyé par un obstacle. Comme on connait la vitesse du son, il est possible de déterminer la distance de l’obstacle en mesurant le temps écoulé entre l’envoi de l’ultrason et la réception de l’écho.
2°) Exercice
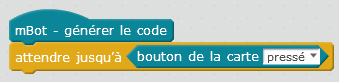
Pensez à toujours commencer le programme par cette sécurité, le robot ne démarre que si on appuie sur son bouton.
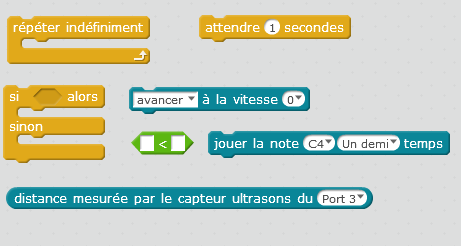
Créer un programme où le robot avance à la vitesse 100, dès qu’il se trouve à 15 cms d’un obstacle, il s’arrête. Il tourne de 90° et avance à nouveau. Cela lui permet de faire le tour du labyrinthe. C’est à dire que vous allez faire le même parcours mais c’est l’information du capteur de proximité qui détermine à quel moment il faut tourner.
Vous vous servirez des instructions suivantes.